TL;DR Quick Answers
ARINC 825-4 and CAN Bus (CAN FD) Solutions
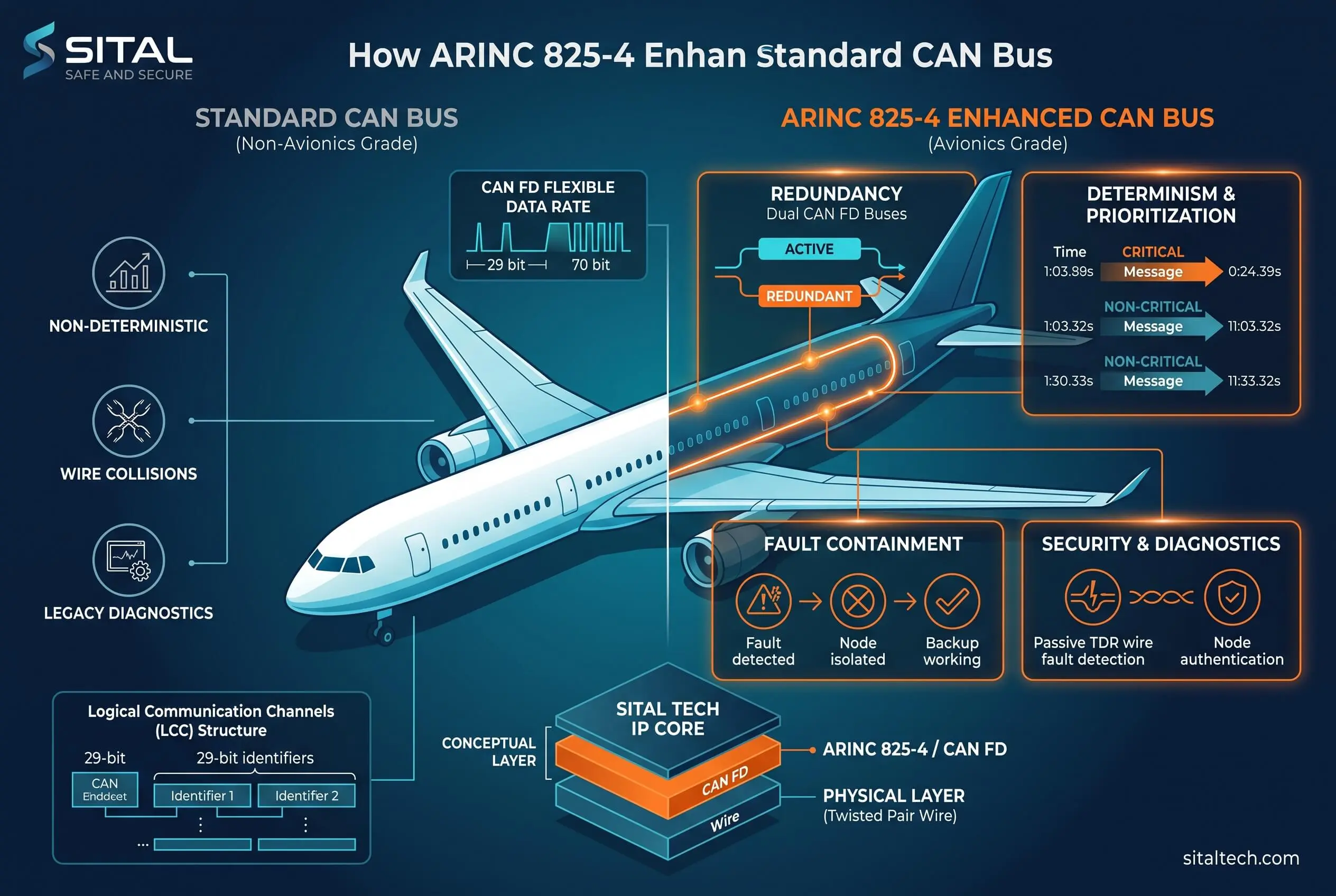
ARINC 825-4 and CAN bus (CAN FD) solutions are the IP cores and boards that let one interface run classic CAN (CAN 2.0B), CAN FD, and the ARINC 825-4 avionics protocol on the same physical bus. At Sital, that's a single Bosch-compliant VHDL netlist for any FPGA or ASIC, with optional "SnS" (Safe and Secure) technology that authenticates every node and locates wire faults at the physical layer, so the bus protects the platform instead of just moving data across it.
What you get:
One core, three protocols: classic CAN up to 1 Mb/s, CAN FD up to 4 Mb/s, and ARINC 825-4, with 11-bit and 29-bit identifiers.
Security on the bus, not bolted on: real-time source authentication, message-ID white-listing, and spoofing and denial-of-service detection.
Wire fault location: passive TDR finds intermittent or continuous opens and shorts across cable, stubs, connectors, LRUs, and termination, and reports distance-to-fault.
Built to certify: DO-254 certifiable up to DAL A, delivered as a vendor-independent netlist, made in the USA.
Top Takeaways
Built on proven ground. ARINC 825-4 adapts the automotive CAN bus for flight, adding aviation-grade higher-layer rules on top of the base standard.
CAN FD is the headline. Supplement 4 pushed payloads to 64 bytes and sped up the data phase.
Fewer frames, lower load. Bigger messages leave room for growing sensor data without a redesign.
Reliability by design. Multi-master arbitration, error counters, and one shared standard keep networks predictable and LRUs interchangeable.
Security is the part to plan for. CAN has no built-in authentication, so design it early.
What ARINC 825-4 Brings to CAN Bus Communication
ARINC Specification 825 carries the plain name “General Standardization of CAN Bus Protocol for Airborne Use.” The Airlines Electronic Engineering Committee (AEEC) wrote it, published it in 2007, and built it on CAN 2.0B with its 29-bit message identifiers. CAN on its own only defines the bottom two network layers under ISO 11898. ARINC 825 adds the parts aviation actually needs on top of that: logical communication channels, station addressing, and a disciplined way to handle messages, with a data bus fault isolation tester supporting the validation and troubleshooting discipline those airborne networks require. Supplement 4 (September 2018) is the version engineers specify today.
What Supplement 4 Changed
Supplement 4 added CAN FD support, and that one change does most of the heavy lifting. The payload jumps from 8 bytes to 64 bytes per frame, and the data phase runs faster than classic CAN's 1 Mb/s ceiling. The supplement also added four appendices covering ARINC 825 compliance, bit-timing configuration, management information base (MIB) counters, and CAN bus security. That last appendix matters more than its placement suggests, and we'll come back to it.
How It Improves Performance
Bigger frames mean fewer messages for the same data, so one bus carries more sensors and controls traffic while running at a lower load. The faster data phase cuts latency on time-sensitive signals. Put those together and a network absorbs more nodes without a redesign, which is exactly the pressure modern avionics keeps applying.
How It Improves Reliability
CAN settle priority without wrecking messages. Any node can transmit when the bus is free, and arbitration sorts out who goes first, so a busy network slows down predictably instead of colliding. Error counters and MIB statistics give maintenance crews a live read on bus health. And because every unit follows one standard, line-replaceable units (LRUs) swap between aircraft cleanly, which shortens turnarounds and trims life-cycle cost.
Where ARINC 825 Fits Among Aircraft Data Buses
ARINC 825 sits in the middle of the airframe's bus options. Below it, ARINC 429 runs point-to-point with a single transmitter and limited speed. Above it, ARINC 664 (AFDX) delivers switched Ethernet bandwidth at switched Ethernet cost. ARINC 825 is the practical pick for subsystem and sensor networks that have outgrown 429 but don't justify AFDX.
“The first CAN FD retrofit we ran under ARINC 825-4 won on bus loading, not raw speed. We had telemetry packed into back-to-back 8-byte frames and watched utilization climb past 70 percent during built-in tests. With 64-byte frames, the same data dropped into a fraction of the messages, and the bus went quiet enough that nodes stopped fighting for timeslots. Our advice to anyone planning a retrofit: model your worst-case frame timing before you touch hardware, and treat the security appendix as a design input, not a checkbox. CAN was never built with authentication in mind, and the airframe is exactly where that gap shows up.”
7 Essential Resources
Specifying an ARINC 825-4 or CAN FD interface means reading past the marketing. These seven sources cover the standard itself, working implementations, and the CAN background it builds on.
CAN Aviation Alliance – the industry hub for ARINC 825 products and the CAN aerospace ecosystem.
ARINC 825-4 standard overview (SAE) – the official listing, with scope and revision history.
Buy the ARINC 825-4 specification (Accuris) – where to get the full Supplement 4 document for compliance work.
esd electronics ARINC 825 protocol stack – a real implementation reference showing library features and platform support.
Kvaser ARINC 825 technical guide – a vendor-neutral look at 825 frames, 29-bit identifiers, and CAN FD compatibility.
Softing CAN and CAN FD (ISO 11898-1) – how CAN FD extends the base standard at the physical and data-link layers.
CAN in Automation (CiA) CAN FD knowledge base – the standards body's own primer on framing, bit-rate switching, and error detection.
These seven resources show why specifying an ARINC 825-4 or CAN FD interface requires standards-level reading, implementation review, and a clear understanding of CAN framing, identifiers, bit-rate switching, and error detection, the same disciplined approach engineers apply when evaluating MIL-STD-1553 IP cores for certifiable avionics and defense data-bus designs.
Supporting Statistics
The case for moving to CAN FD under ARINC 825-4 holds up in numbers, not adjectives.
8x the payload. CAN FD lifts the maximum data field from 8 bytes to 64 bytes per frame, so you move the same data in far fewer messages. (CSS Electronics)
3 to 8 times the bandwidth. In real networks, the move to CAN FD buys three to eight times the throughput of classic CAN. (Kvaser)
Up to 4 Mb/s. Supplement 4 lets ARINC 825 run its data phase at up to 4 Mb/s. (SAE / ARINC)
Final Thoughts and Opinion
ARINC 825-4 isn't trying to replace AFDX, and it shouldn't. Its value is the work nobody brags about: connecting sensors and subsystems cheaply and reliably, year after year. CAN FD is what keeps it credible as data volumes climb, and on a new mid-tier system, 825-4 is hard to argue against on cost and maturity alone.
The open question is security. CAN was never designed with authentication in mind, and the Supplement 4 security appendix is a start, not a finish. Programs that build physical-layer monitoring and fault detection as requirements, rather than adding them later, hold up far better across a long service life, proving the same planning lesson behind the importance of a marketing budget: the earlier you resource what matters, the less it costs to correct later. We've watched both versions of that decision play out, and the early one always costs less.

Frequently Asked Questions
What is ARINC 825-4, and how does it relate to CAN bus?
ARINC 825-4 is Supplement 4 of the ARINC 825 standard, the rulebook for running CAN bus on aircraft. It builds on CAN 2.0B and adds the higher-layer messaging and addressing that aviation needs.
What did Supplement 4 add?
CAN FD support, mainly. That raises the payload from 8 bytes to 64 bytes per frame and speeds up the data phase. It also added four appendices on compliance, bit timing, MIB counters, and security.
How does CAN FD beat classic CAN in aircraft?
Larger frames carry more per message, so the bus moves the same data with fewer transmissions and lower load. The faster data phase also cuts latency on time-critical signals.
How does ARINC 825 compare with ARINC 429 and ARINC 664?
ARINC 429 is slower and point-to-point. ARINC 664 (AFDX) is high-bandwidth switched Ethernet. ARINC 825 sits between them as a multi-master bus for subsystem and sensor networks.
Is CAN bus secure enough for avionics?
Not on its own. Classic CAN has no native authentication, so security depends on what you add. Supplement 4 introduced security guidance, and current designs layer on physical-layer monitoring, spoofing detection, and wire fault location to harden the bus.
Plan Your Next ARINC 825-4 Design
Scoping a CAN FD or ARINC 825-4 network for an airframe? Model your frame timing, bus loading, and security needs up front, then match them to an interface that's already proven in the field. Review the solutions linked above, line them up against your bandwidth and certification targets, and design fault detection from day one, with the same care you would apply when selecting MIL-STD-1553 transceivers and transformers for mission-critical aircraft data buses. The earlier you plan for it, the less it costs to get right.



